关于自动驾驶该用什么眼睛,吵了少说也有十年了。
两拨人,谁也说服不了谁。
一拨是以马斯克为代表的“纯视觉派”。他的车上,不光没有激光雷达,连毫米波雷达、超声波雷达都干脆拆了个干净,就留几个摄像头。
他的逻辑很简单:人开车靠两只眼睛,车开车靠摄像头,这才叫“第一性原理”。至于激光雷达?他觉得那玩意儿又贵又多余。而且你想想,摄像头说前面是个红球,激光雷达说前面是个方块,到底听谁的?传感器打架了,决策反而更危险。所以他干脆全砍掉,就信摄像头。

另一拨人走的是“多传感器融合”路线,激光雷达加摄像头一起上。摄像头认颜色、看红绿灯、读路牌,激光雷达测距离、画三维图,各补各的短。从理论上讲,这确实更保险,毕竟俩眼睛总比一个看得全。
说实话,谁都希望能只用一种传感器。简单、省钱、没冲突。但问题是,现在这俩东西各有各的毛病。
摄像头便宜,能认出颜色、文字、手势、红绿灯,这些是它拿手的。但它拍出来的是平面图,没有三维信息,而且一到晚上或者钻隧道,光线一暗就看不清。

激光雷达正好反过来。它贵,一套好几千甚至上万块,但它直接给你三维点云,黑天也照样看得清清楚楚。可它有个硬伤——分不清颜色。你让它看红灯绿灯,它看到的全是灰度图,只能靠反射强度猜。至于路牌上的字、交警的手势,它更没辙。
所以大家就在等:要么摄像头哪天能拍出三维、晚上也能看得清,那激光雷达就可以扔了;要么激光雷达哪天能认出颜色、再把价格打下来,那摄像头就可以退休了。
这不,中国企业先出手了。
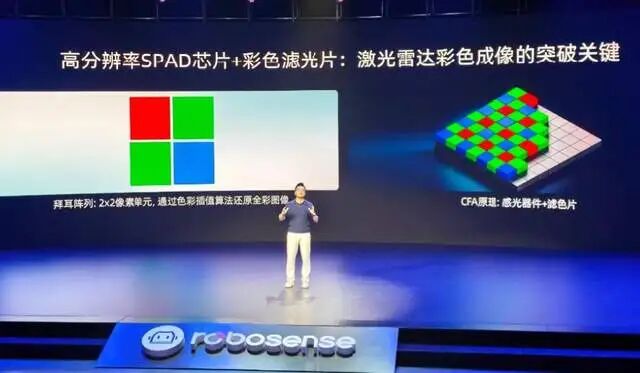
前两天,有一家叫RoboSense速腾聚创的公司,开了个发布会,说他们搞出了一个新东西——RGBD传感器。名字听着专业,说白了就是让激光雷达也能“看见”颜色了。摄像头能干的识别红绿灯、路牌、手势这些活,它全都能干。而且它本来就有三维和夜间优势,这下等于把摄像头的功能也吞了进来。
这才是真正的“二合一”。
他们计划2027年量产。注意,不是PPT吹牛,是给了明确时间表的。当然,现在离2027年还有一阵子,这东西到底行不行,能不能稳定上车、成本能不能压下来,都还得看。但方向已经摆在这了。

一旦这种能识别颜色的激光雷达真的落地,那纯视觉方案存在的意义就大打折扣了。摄像头能干的它都能干,摄像头干不了的它也能干。到那时候,一直坚持纯视觉的特斯拉,该往哪走?
是继续头铁只用摄像头,还是回头重新捡起激光雷达?
现在没人能给出答案。但可以肯定的是,2027年不远了。到时候,这场吵了十年的路线之争,可能真的要见个分晓了。
鼎泽配资提示:文章来自网络,不代表本站观点。